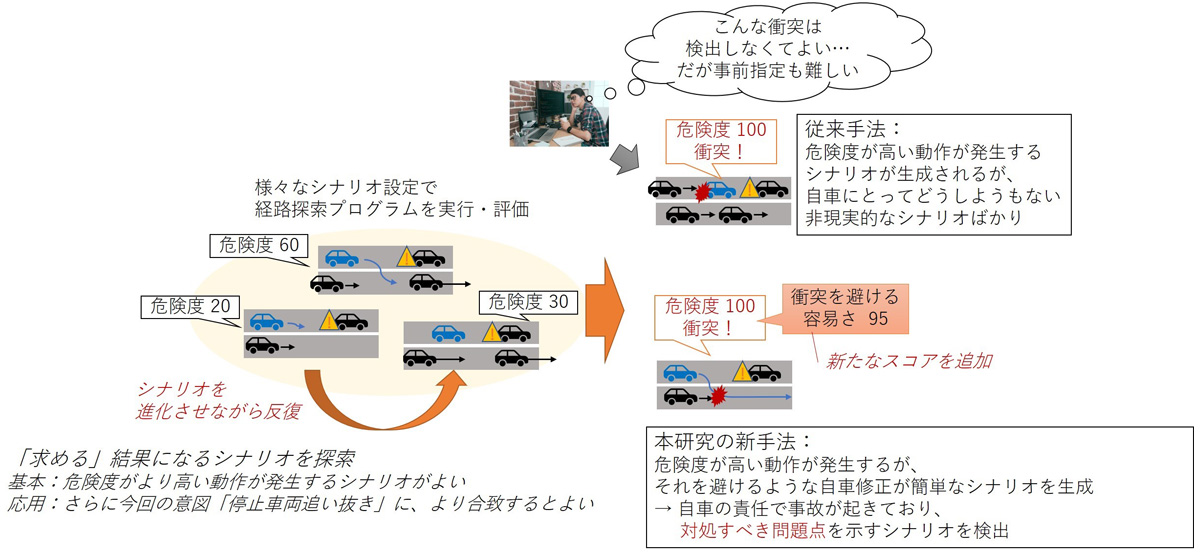
本研究チームは特に自動運転システムを対象とし、このような高度な自動テスト生成の技術に重点的に取り組んできました。具体的な仕組みとしては、AIの一分野である「進化計算」の技術を用い、生物の進化を計算機内で模倣する方法を研究しています。より危険性が高い動作を引き起こしたシナリオほど「より強い生き物」と見なし、淘汰、そして交配や突然変異による進化を模倣した計算を行うことで、「非常に強い生き物」、つまり非常に危険性が高い動作が発生するシナリオを探索する方法です。
本研究では、この進化計算を用いた手法を改良することで、非現実的なシナリオを生成してしまう課題を解決し、現実的かつ危険な動作を引き起こすシナリオを自動検出する手法を開発しました。危険性が高い動作、特に衝突を引き起こすシナリオを探索する際に、その衝突を回避できる経路計画プログラムの微修正が可能かも同時に検出します。この新手法では、「このシナリオにおいて今の経路計画プログラムでは衝突が起きるが、例えばある設計パラメーター(乗り心地など)をわずかに設定変更すると、同じシナリオでも衝突が起きない経路が選ばれる」といったシナリオを検出できます。
このように検出したシナリオは、「この衝突は避けようがないものではなく、この衝突を起こさないよう経路計画プログラムの修正が必要である」と安全性に示唆を与えるものになります。このように本手法では、開発者が現実的な想定について細かに明確に書き出す必要がなく、対処が必要となる問題点を自動検出できます。
また、本手法では、ミュンヘン工科大学との協働により、特定の状況に絞ったシナリオの探索も行っています。自車が他車を追い抜く状況や駐車車両を避ける状況での危険な動作など、複数の状況のそれぞれにおいて、明らかに対処が必要な衝突シナリオを検出することに成功しています。これによって、開発者は、考えるべき大まかな状況を複数指定して、それぞれの状況での問題点を検出させることができます。
"計画" - Google ニュース
March 23, 2020 at 12:02PM
https://ift.tt/2WAls3v
共同発表:自動運転の経路計画プログラムから危険動作を自動検出する手法を開発~細かい指定をせずに、現実的かつ危険な動作を発見する~ - 科学技術振興機構
"計画" - Google ニュース
https://ift.tt/2RKVlEs
Shoes Man Tutorial
Pos News Update
Meme Update
Korean Entertainment News
Japan News Update
0 Comments:
Post a Comment